COMP7404 Computational Intelligence and Machine Learning
Topic 3 Adversarial Search
A Multi-agent Competitive Environment
- Other agents are planning against us
- Goals are in conflict (not necessarily)
Game Definition
- A game can be defined as
- s : States
- s0: Initial state
- Player(s) : Defines which player has the move
- Actions(s) : Returns a set of legal moves
- Result(s,a) : Defines the result of a move
- TerminalTest(s) : True when game is over, false otherwise
- Utility(s,p) : Defines the final numeric value for a game that ends in terminal state s for player p
- A game tree can be constructed
- Nodes are game states and edges are moves
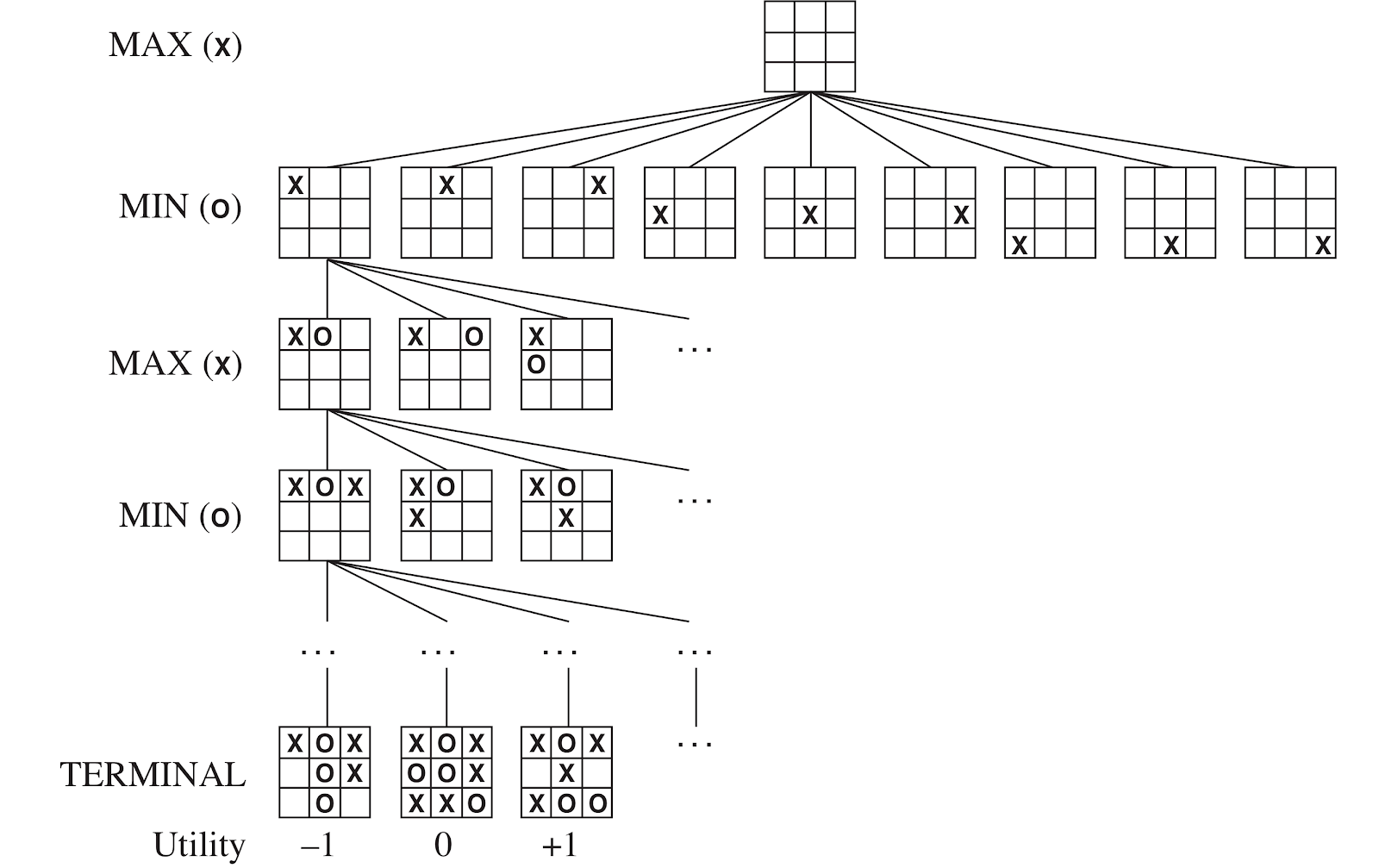
Tic-Tac-Toe Game Tree
Minimax Search
- A state-space search tree
- Players alternate turns
- Compute each node’s minimax value
- the best achievable utility against a rational (optimal) adversary

- Will lead to optimal strategy
- Best achievable payoff against best play
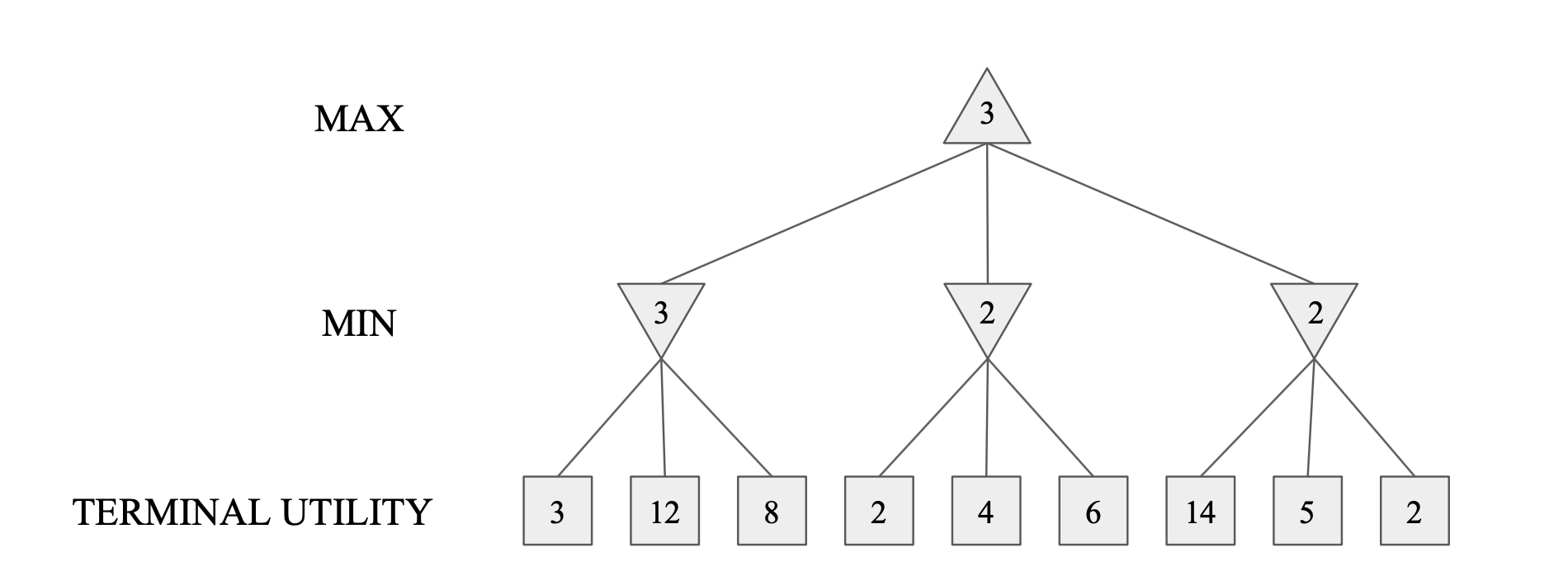
- Example
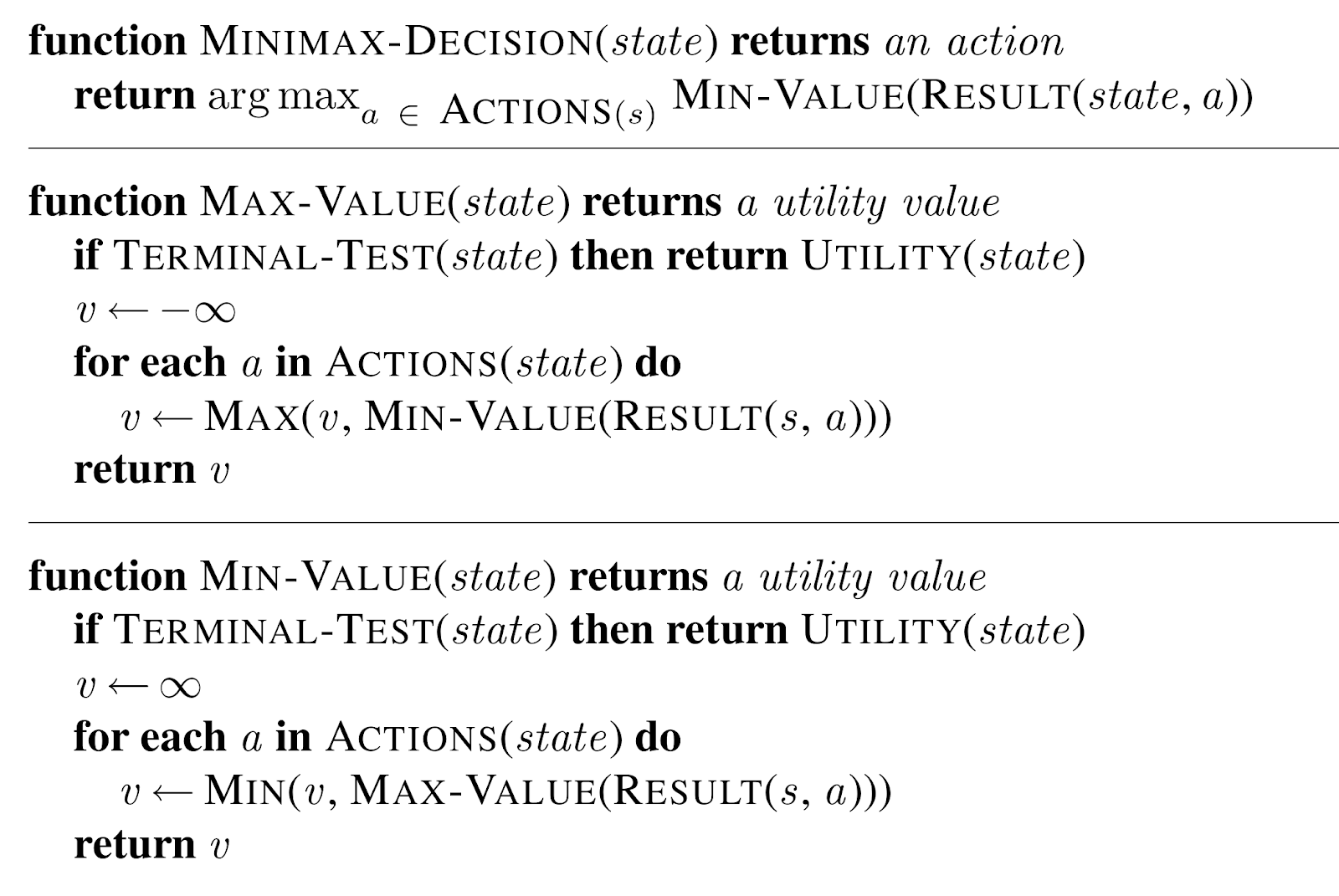
- Implementation
- Properties
- Complete - Yes, if tree is finite
- Optimal - In general no, yes against an optimal opponent
- Time complexity - O(b^m)
- Space complexity - O(bm)
Depth-Limit Search (DLS)
- A depth limit search (DLS)
- Search only to a limited depth in the tree
- Replace terminal utilities with an evaluation function for non-terminal positions
- Problems
- Guarantee of optimal play is gone
- Need to design evaluation function
- An evaluation function
- An evaluation function Eval(s) scores non-terminals in depth-limited search
- An estimate of the expected utility of the game from a given position
- Ideal function
- The actual minimax value of the position
- The performance of a game-playing program depends strongly on the quality of its evaluation functio
- An evaluation function Eval(s) scores non-terminals in depth-limited search
𝛼-𝛽 Pruning Algorithm
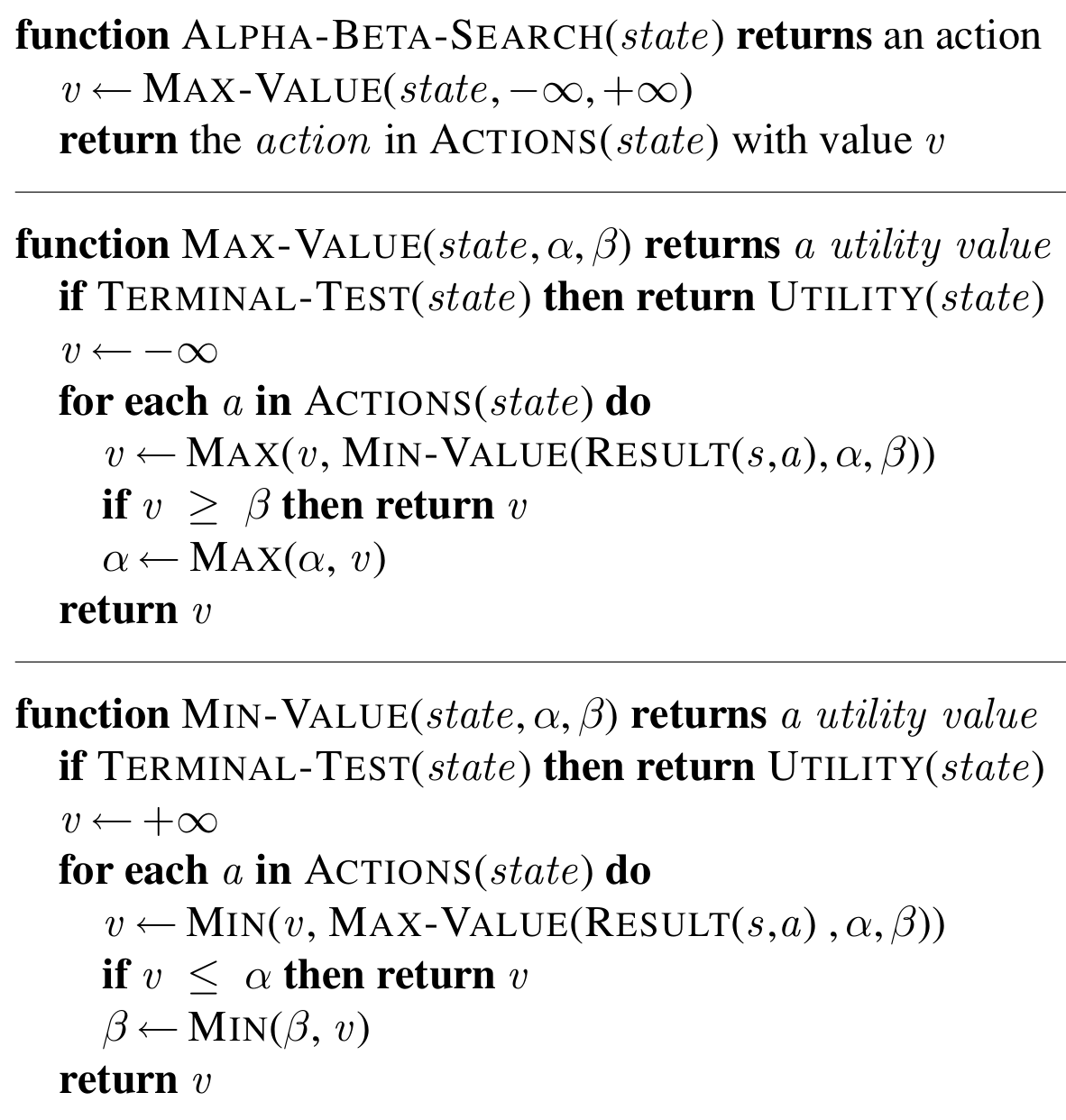
- Min version
- Consider Min’s value at some node n
- n will decrease (or stay constant) while the descendants of n are examined
- Let m be the best value that Max can get at any choice point along the current path from the root
- If n becomes worse (<) than m
- Max will avoid it
- Stop considering n’s other children
- Max version is symmetric
- Properties
- Pruning has no effect on the minimax value at the root
- Values of intermediate nodes might be wrong
- Action selection not appropriate for this simple version of alpha-beta pruning
- Move ordering
- The effectiveness of alpha-beta pruning is highly dependent on the order in which states are examined
- It is worthwhile to try to examine first the successors that are likely best
- Examine only O(b^(m/2)) nodes to pick the best move, instead of O(bm) for minimax
Expectimax Search
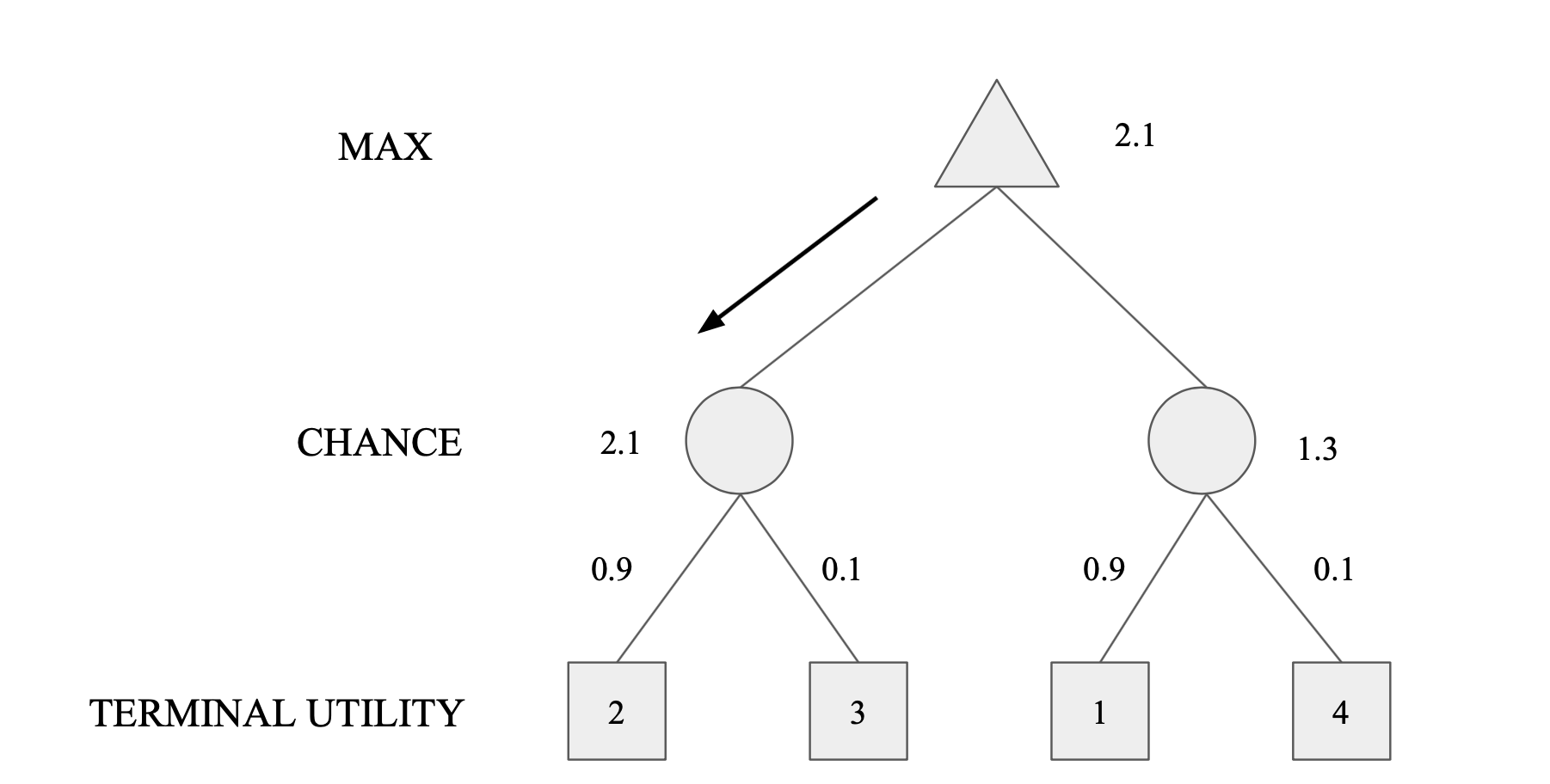
- Values reflect average case outcomes, not worst case outcomes
- Expectimax search computes the expected score under optimal play
- Max nodes as in minimax search
- Chance nodes are like min nodes but the outcome is uncertain
- Calculate their expected utilities
- i.e., take weighted average of children
- Expectiminimax
- Environment is an extra "random agent" player that moves after each min/max agent
Multi-Agent Utilities
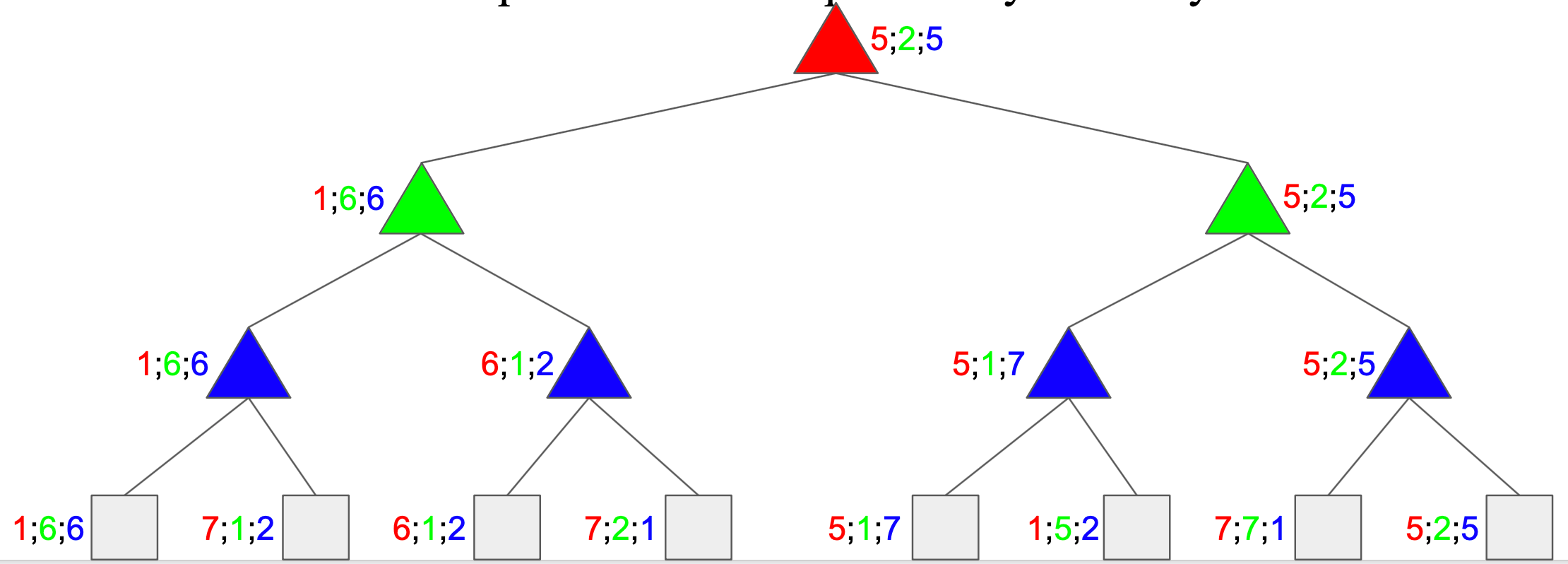
- Generalisation of minimax
- Terminals and nodes have utility vectors
- Each player maximizes its own component
- Gives rise to cooperation and competition dynamically